

Серия IOT (Интернет вещей)
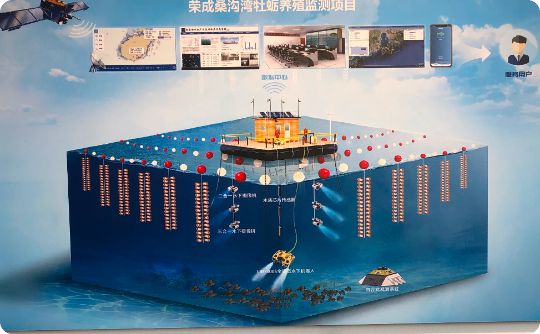
Система интернета вещей включает в себя датчики и устройства, взаимодействие которых осуществляется через облачное соединение. Включает в себя аппаратную и программную системы.

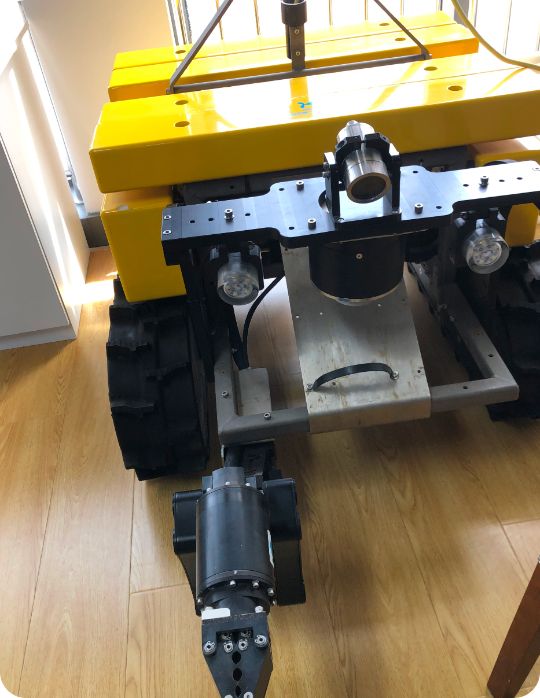
Серия носителей
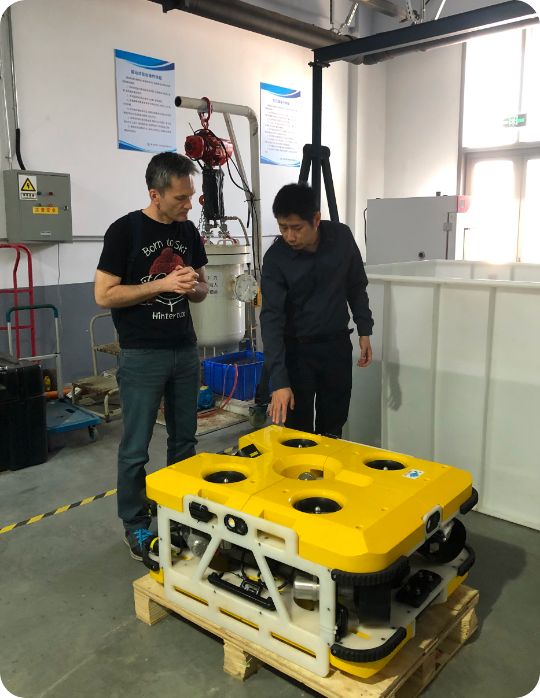
Модельный ряд подводных роботов с характеристиками, описанием назначения и комплектацией.
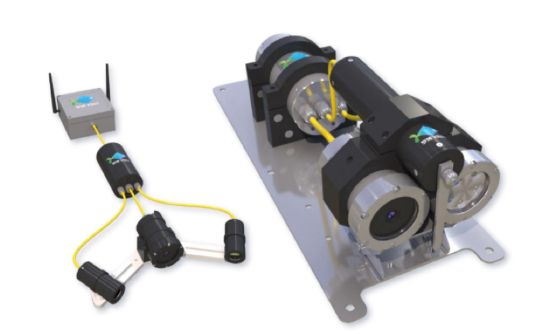
Серия датчиков
Датчики собирают данные в определенной среде. Устройство может иметь несколько датчиков, например, смартфон оснащен GPS, камерой, акселерометром и другими датчиками. Датчики собирают данные из окружающей среды для решения определенных задач.



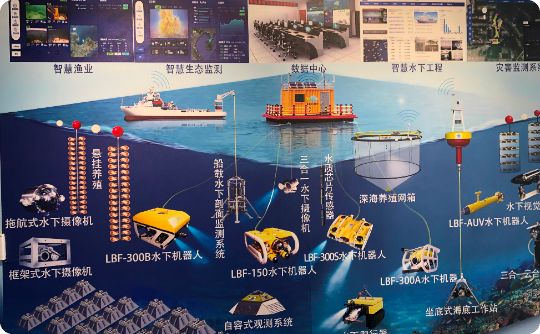
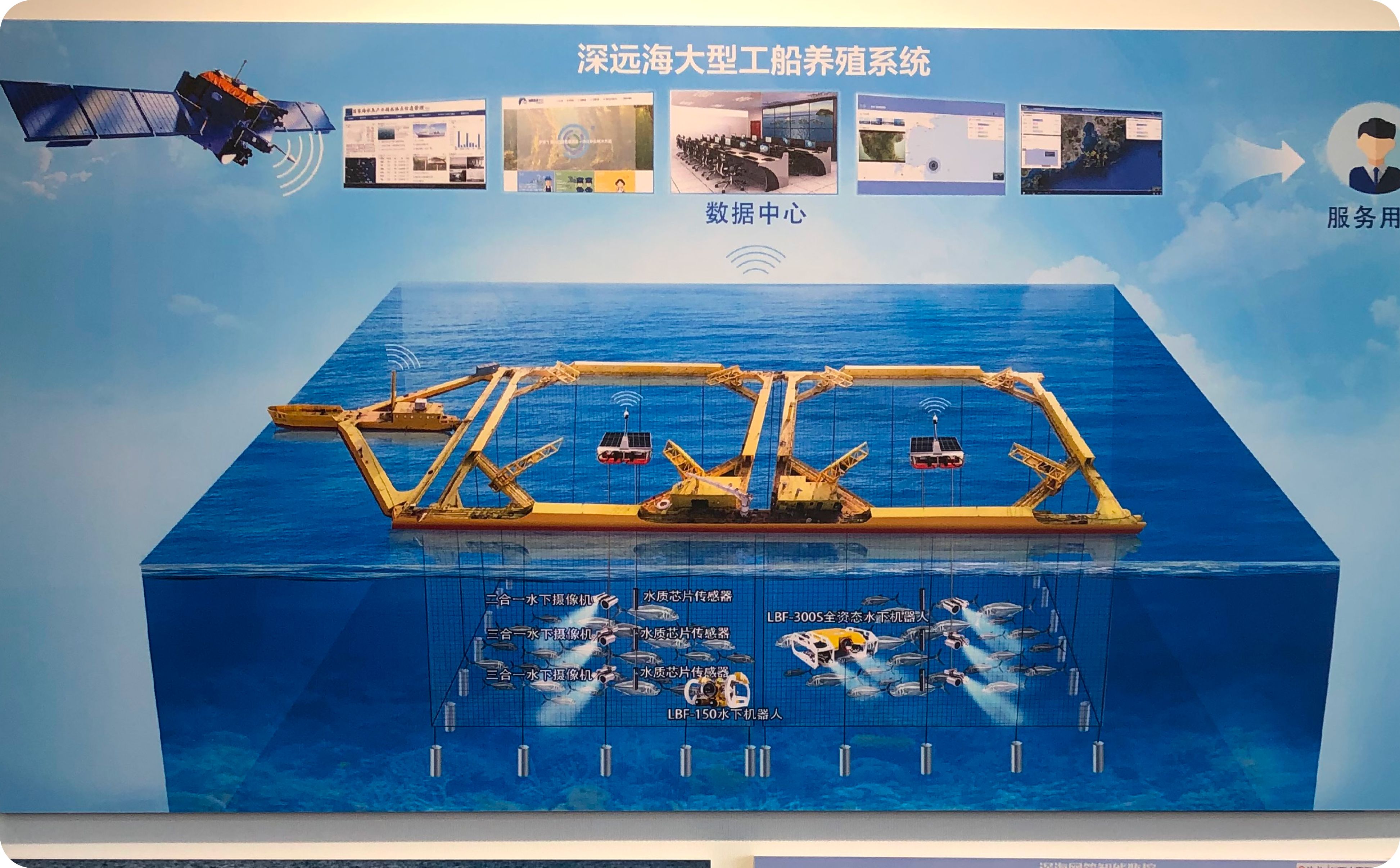



Области применения подводных роботов
- Аквакультура (обследование, очистка, ремонт загонов для разведения рыбы);
- Военные и антитеррористические применения;
- Поисково-спасательные работы;
- Измерение кислотности воды (контроль pH). Робот-рыба проконтролирует кислотность воды. Актуаторы из сплавов с памятью формы, которые изгибают гибкую структуру, играющую роль скелета робота;
- Изучение океанических течений. Исследования океана, морской флоры и фауны;
- Геология. Подводная геология, например, поиск природных ископаемых, их добыча;
- Морские фермы с автоматическими системами для разведения рыбы;
- Телеком. Участие в обследовании подводных кабелей, прокладке подводных кабелей;
- Обследования опасных объектов, подводных частей торосов и айсбергов, подводных вулканов, плотин ГЭС;
- Очистка корпусов судов;
- Энергетика. Обследование размещенных под водой механизмов и устройств, например, принадлежащих нефтяникам морских платформ, обследование подводной инфраструктуры морских ветроэлектростанций;
- 3D-съемка донного рельефа.
Для определения собственного положения под водой роботы обычно используют системы инерциальной навигации. Они представляют собой набор акселерометров, регистрирующих ускорения и маневры аппаратов. Периодически аппараты всплывают для сверки координат и коррекции инерциальных систем по GPS. Подводные роботы сегодня активно используются и в военных, и в гражданских целях.
СВЯЖИТЕСЬ С НАМИ
Мы всегда готовы и открыты к тесному сотрудничеству!
Позвоните нам, напишите на электронный адрес или запросите обратную связь.
Наши компетентные менеджеры оперативно ответят вам и предоставят всю необходимую информацию.